Team_Pigeon The Dropper
Video
Project Summary
Our project attempts to have an agent complete a “Dropper” map, which is a map in which a player attempts to fall safely to the bottom while avoiding obstacles. Our agent will be completing a map in which there is a 5 block wide and 250 block high tunnel. Inside the tunnel, there are some randomly generated obsidian obstacles at different locations (By randomly generating the map, the agent sometimes meets a more complex situation: for example, it can go left to avoid hitting an obstacle, but that would cause a dead-end or narrow escape further down). At the bottom of the tunnel, there is a pool of water.
The agent will spawn at the top of the tunnel and begin falling from it. The goal of the mission is for the agent reach the bottom of the tunnel and land in the pool of water safely without taking any damage. In this process, the agent will strafe in the air by moving in different directions to avoid all obsidian obstacles inside the tunnel to avoid dying from fall damage and make its way to the bottom.

This problem isn’t trivial because the solution can be quite complex. There are a lot of ways to reward and punish the agent and finding the best way takes a lot of time. The falling speed of the agent raises another challenge and it is the biggest challenge of this project. Since we are not able to control the falling speed of the agent, we can only adjust the value of other parameters to adapt to it. Our team has to find the most suitable obstacle density and optimal timing for the agent to perform actions while falling. If the time between actions is too long, the agent makes less move so it will dodge less obstacles, lowering the probability of success. If the time is too short, the rewards do not get registered correctly by Malmo. Also, if the gap between two obstacles is too short, the agent would not have enough time to make a move. The goal for the map and obstacle creation was to make the obstacles and map realistic and playable enough that even humans could have a decent chance of completing maps.
To find the best way to solve the problems above, our team experimented with manipulating our environment and trying out several different reinforcement learning algorithms.
Approaches
Our agent’s actions are rewarded with the following: Reward Function \(R(s)=\left\{ \begin{aligned} 100 &\ (\text{Agent reaches water safely})\\ 1 &\ (\text{+1 For every millisecond the agent is alive})\\ \end{aligned} \right.\)
The agent is greatly rewarded with 100 points for completeing the objective and reaching the water safely. However, we wanted to ensure that the agent wouldn’t spend time randomly moving until it luckily lands in the water or hits an obstacle. Thus we added another reward for staying alive as long as possible in order to encourage the agent to dodge obstacles and get lower in the tunnel. We decided to have the agent receive 1 point for every millisecond of in-game time it remained alive.
To keep simplicity, our agent always faces the north and only takes discrete actions consisting of:
- Strafe right
- Strafe left
- Move forward
- Move backwards
- Stand still
DQN
We are primarily using Reinforcement Learning for our approach in the project, using the below DQN algorithm.
\[Q(S_t, A_t)\leftarrow Q(S_t, A_t) + \alpha[R_{t+1} + \gamma\max_a Q(S_{t+1},a)- Q(s_t, A_t)]\]The algorithm can be interpreted as this: (Updated Q Value) –> (Current Q Value) + (Learning Rate)[Reward + (Discount Rate)*(Max Expected Reward)- (Current Q Value)]
Our agent will take a 3 x 30 x 3 grid of the blocks around it as observation. Since our map is a vertical tunnel and the agent drops from the top of the tunnel, the falling speed of the agent is fast. Therefore, we set the grid so that the agent can ‘see’ 30 levels or blocks down in order for it to have enough time to dodge obstacles.
Each episode will see the agent taking the above actions until it reaches a terminal state of either successfully landing in the pool of water or dying from hitting an obstacle.
We used several different algorithmic approaches ranging from DQN learning and PPO to train our agent:
For one of our DQN approaches:
For each episode:
While the agent hasn't reached the pool of water or dies:
Choose an action by applying epsilon greedy policy from Q network
Take the action
Get the next observation by check the 3*30*3 grid around the agent
Calculate the reward
Update Q network
To get the action of each step, we apply the following function from lecture:
\[\pi(a|s)=\left\{ \begin{aligned} \epsilon/m+1- \epsilon \text{ }[\text{ if a*} = argmax_{(a \in A)} Q(s,a)]\\ \epsilon/m \text{ otherwise}\\ \end{aligned} \right.\]We created a list called action_prob to save the probabilities for each action. Then, we calculate action_prob based on the formula above and randomly choose an action based on the probabilities in action_prob list.
To improve on our baseline DQN algorithm we fixed our implementation of the episilon greedy policy and passed the Q network through a series of layers and activation layers.
Activation Function
The activation function is an essential element for neural network. Choosing the right activation function for a layer is important and has a significant impact on the the training process. In the project, we have tried out different activation functions to experiement which of these give us the best result. The three activation functions shown below are used in the project:
 |
 |
 |
-
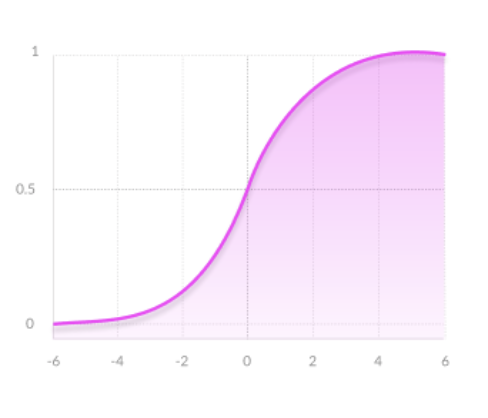
Sigmoid: Output values is between range 0-1, which can produce very clear prediction. For very high or low values of x, this function almost doesn’t affect the prediction, which may result in the network refusing to learn.
-
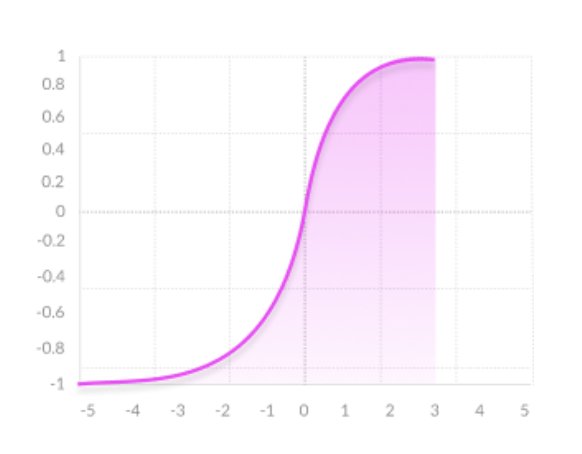
Tanh: Zero centered, which makes negative, neutral, and strongly positive values easy to distinguish by the model.
-
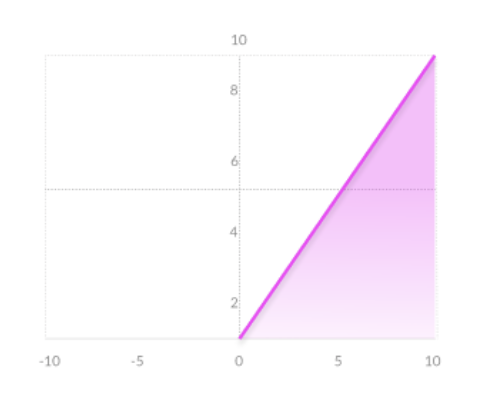
ReLU: This function allows the network to converge very fast. However, the gradient of the function becomes zero when inputs are close to zero, or are negative and the network cannot learn.
We used a sample of these activation functions to improve our baseline, and determined a series of activation functions the network had to go through that led to decent performing results after numerous trials and tests.
Rainbow DQN
We also experimented with one approach as an extension to DQN: Rainbow DQN, a combination of several improvements to DQN algorithms. RLlib provided us with an implementation of a standard DQN algorithm, and with a few given modifications we were able to easily transform it to Rainbow DQN.
Essentially, Rainbow DQN is a dubbed term of a combination of extensions of DQN. These include the following: Double Q-learning, prioritized replay, dueling networks, multi-step learning, distributional reinforcement learning, and noisy neural network stream. A more in-depth explanation of these terms are included in the research paper in our source .
PPO
We also experimented another reinforcement learning algorithm called Proximal Policy Optimization (PPO) using the Ray RLlib library. PPO explores by sampling actions according to its latest version of its stochastic policy. This randomness depends on the initial conditions of the environment. The stochastic policy eventually becomes less random and encourages the agent to utilize paths to rewards it has found already.
Below is a standard algorithm for PPO, although we used RLlib’s implementation of it for use in our project.
For each episode:
For each agent:
Run stotastic grading policy in environment for set number of time
Compute advantage estimates at each timestamp
Optimize surrogate loss function with respect to old policy parameters, with K epochs and a minibatch size ≤ to the number of agents * timesteps
Replace the old vector of policy parameters with the newly formed one
Evaluation
Quantitative
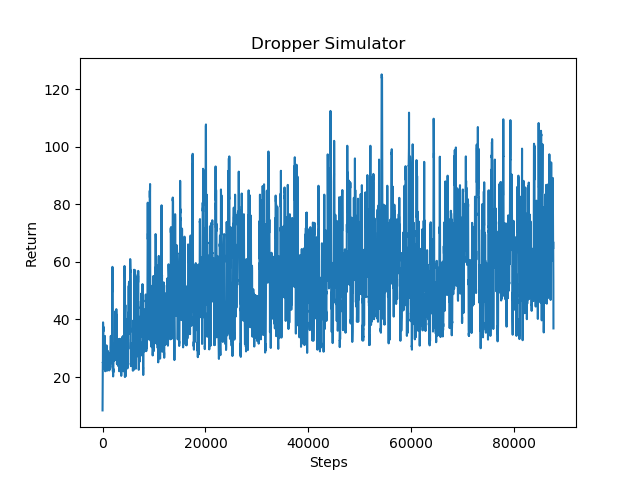
We evaluate our agent on its performance while performing the mission. We originally evaluated our agent solely on its performance on its steps vs return graph but found it to not be incredibly useful. By using graphs of the return values we can see how effectively our agent is learning with our current reward parameters. Though we realized it was not incredibly clear to the viewer of the performance of the agent due to the large amount of noise. We added an extra table to our evaluation set that includes a sample of data between a range of episodes the agent performs in. Each sample of data contains the average return and success rate of reaching the water for that range of episodes. We expected the agent to receive consistently high scores and to learn how to receive the maximum possible rewards, and learn to successfully complete the mission. Over time, we noticed that with our range of reinforcement learning algorithms, our agent improves and on average receives higher results.
DQN
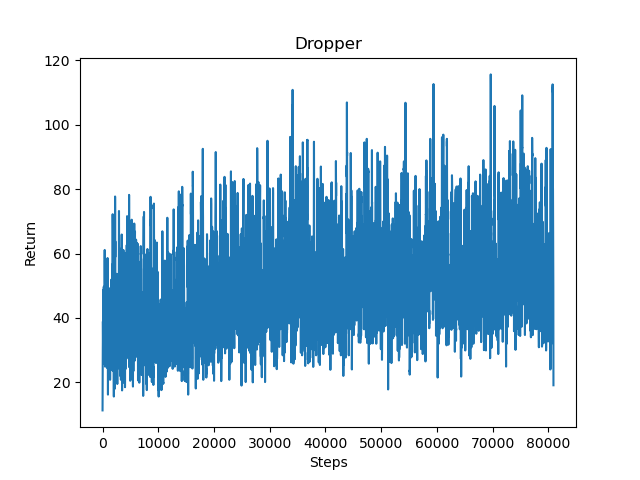
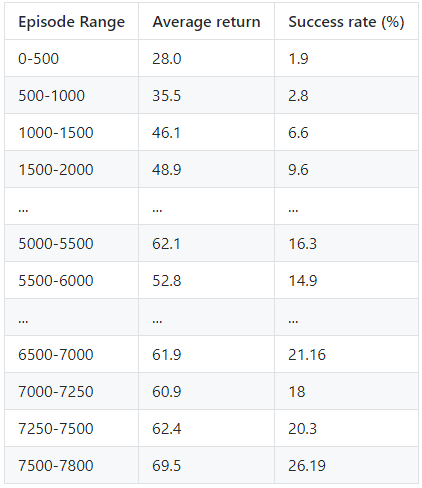
Based on the below data, it is seen that our original implementation of DQN was not very successful. The agent appears to slowly learn to navigate against obstacles and sometimes reach the bottom, but the agent seems to still make some random movements most of the time. While it may have improved slightly, its low success rate was not what our group was looking for. This may be due to low amount of episodes/steps the agent takes before it starts to use purely the best action from the episilon greedy policy table. The agent at this point most likely still made a majority of random actions to complete the mission.
 |
 |
By modifying our implementation of the episilon greedy policy to fix a previous issue with it, and adding additional layers for the neural network to pass through, we received the following results for success. This was to be expected, since as a base, DQN does not perform very well without any modifications. Our original DQN used simply one RELU activation layer for its Q network.
PPO
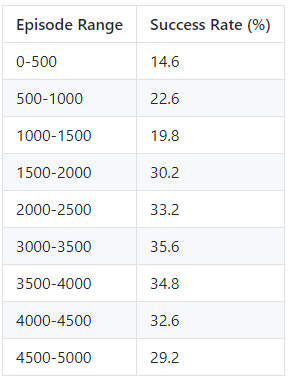
Based on the below data, PPO performed reasonably well compared to the others with an approximate success rate at about 20 to 25%. The upwards trend in returns is more apparent and visible here. The returns also do not fluctuate as greatly as the original DQN, meaning the agent does not suddenly perform very well for a few episodes and then drop and perform and achieve the lowest possible rewards for the mission. The agent manages to survive the first few top floors of the tunnel, while also occasionally reaching the bottom sometimes.
 |
 |
Rainbow DQN
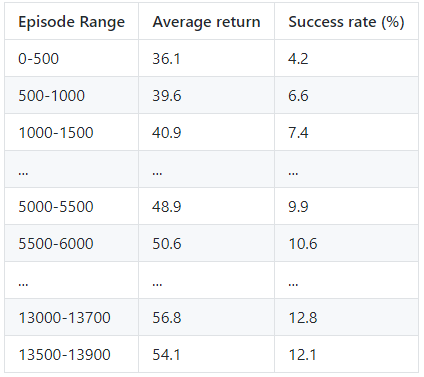
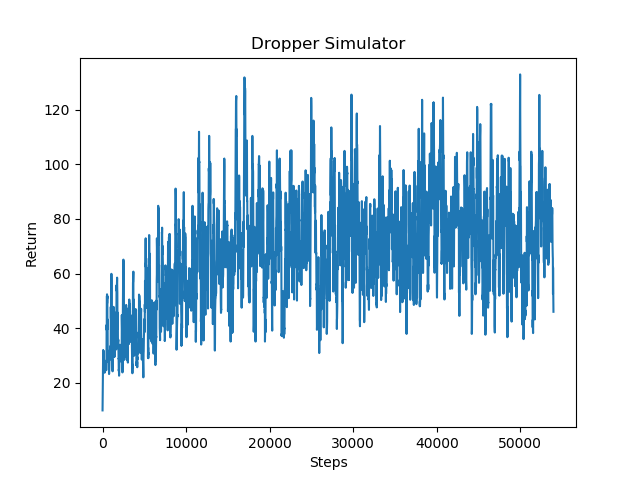
Based on the below data, the Rainbow DQN algorithm, using RLlib’s DQN algorithm with additional hyperparameters performed the best out of the three algorithms we tested. This was surprising, because after researching the Rainbow DQN algorithm and seeing the results in the paper about it, we did not expect the algorithm to work as well as it did in our project too. Compared to the bare DQN and PPO algorithms above, it is clear that the agent ends up receiving on average, much higher returns. The graph is much less densely populated with low average returns compared to the other two algorithms. The Rainbow DQN’s average return and success rates are also about double, if not more, than the base DQN algorithm.
 |
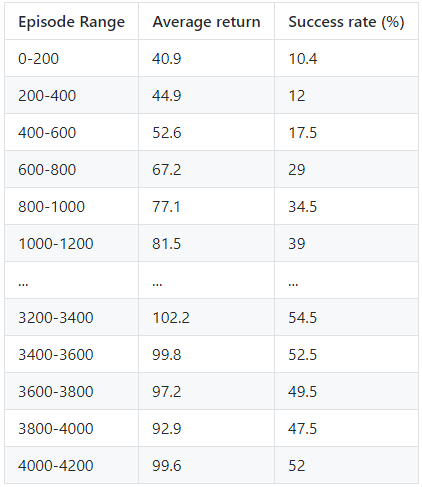 |
While we were expecting a possibly higher success rate for the agent for our project, an approximate estimate of 50% success is quite good. We noticed that increasing the rate of obstacles in the tunnel did in fact lower the average returns and rewards for the agent, since sometimes the agent would be put into difficult situations. For example, if the agent was placed on the bottom left corner of the tunnel and was forced to move to the top right corner, the agent would not have enough time to “see” the difficult obstacle and move over to the corner in time. We found the environment challenging enough for both humans and the agent.
Qualitative
It can be seen that the agent begins taking random moves with a high probability of failing the mission. Over time, gradually the agent learns to dodge the obstacles and succesfully finish the mission. The clips of the agent’s performance in our video demonstrate this. In the beginning of training, the agent makes random movements and rarely completes the mission. Eventually, over the course of several thousand period of episodes the agent slowly improves and recognizes the different obstacles and shapes the obstacles occur in and learns which direction to move in order to dodge them.
References
CS175 Assignment 2’s DQN algorithm’s episilon greedy policy
PyTorch and TensorFlow library